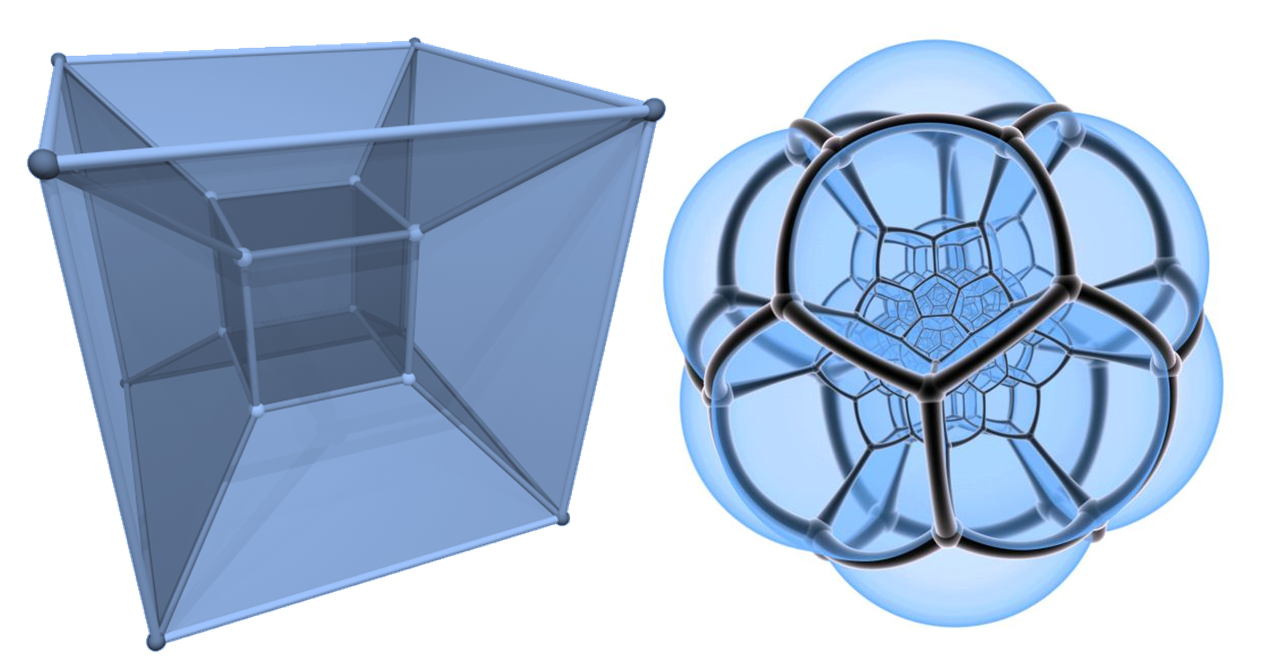
„Jak oczami wyobraźni zobaczyć 4 wymiary? – zapytano matematyka. To proste – odpowiedział – wystarczy wyobrazić sobie n-wymiarów i podstawić n=4″ 🙂
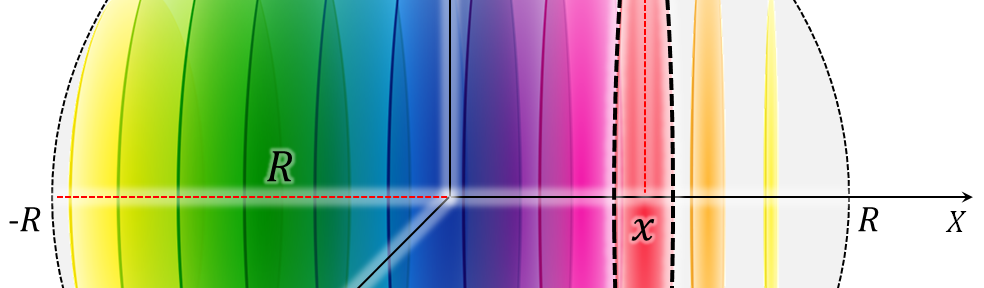
Dzisiejszy wpis poświęcę pomiarom odległości, powierzchni i pojemności w przestrzeniach wielowymiarowych. N-wymiarowa przestrzeń euklidesowa dostarcza dosyć oczywistą metrykę – a przez to wydawałoby się – bardzo intuicyjną. To wrażanie jest jednak mylne, co łatwo pokazać analizując wpływ zwiększania liczby wymiarów na dokonywane pomiary. Jak w zależności od liczby wymiarów zmienia się powierzchnia i objętość kuli? Analogicznie – jak zmienia się maksymalna odległość pomiędzy wierzchołkami kostki? Obiecuję – odpowiedzi będą zaskakujące 🙂
Możesz mieć wrażenie, że to wyłącznie abstrakcyjne rozważania. Czy na pewno? Ja w zasadzie na co dzień analizuję Klientów opisanych szeregiem miar. Poszukiwanie podobieństw, skupień, segmentów czy „najbliższych sąsiadów” niemal w całości opiera się na wielowymiarowej metryce euklidesowej. Zapraszam do pogłębienia wiedzy w tym obszarze:-) Zapewniam – warto!
W części 1 wpisu na temat Spirali Ulama zaznaczyłem, że efekt wizualnego ułożenia liczb pierwszych na diagonalach spirali kwadratowej jest konsekwencją głównie dwóch własności:
Na przekątnych są albo same liczby parzyste, albo same liczby nieparzyste, zatem tylko diagonale z liczbami nieparzystymi będą agregować liczby pierwsze;
Niektóre diagonale zagęszczają bardziej liczby pierwsze niż inne, co wynika z zależności pomiędzy przekątnymi i funkcją kwadratową oraz faktem, że niektóre funkcje kwadratowe generują więcej liczb pierwszych niż inne.
Dzisiejszy tekst poświęcę przybliżeniu własności nr 2.
Wielomiany i rekurencja
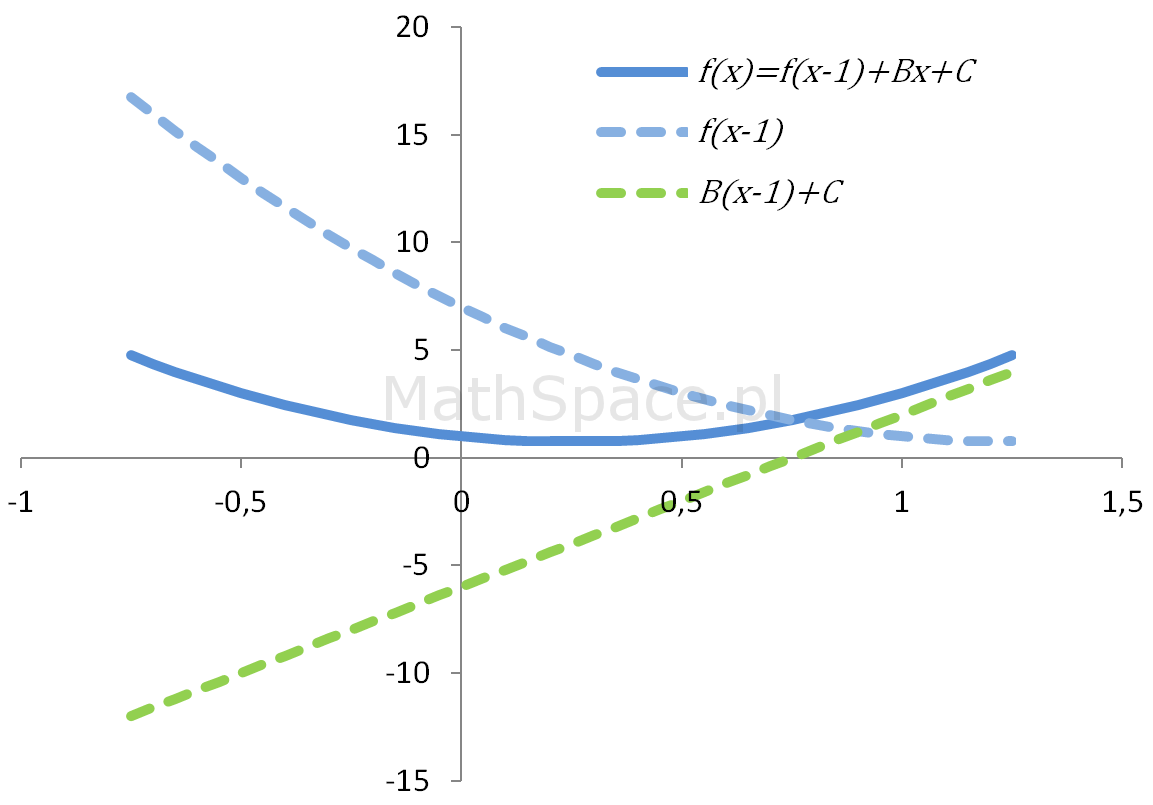
Dla wielomianów możemy zawsze podać ich postać rekurencyjną, Jest to własność mało znana, jednak dosyć prosta w uzasadnieniu. Pokażę to na przykładzie funkcji kwadratowej, jednocześnie wzbogacając cykl „Zabawy z rekurencją” 🙂
$$f(x) = ax^2+bx+c$$
Rozważmy następnie równanie
$$f(x+1)=f(x)+Bx+C$$
Podstawiając i upraszczając…
$$a(x+1)^2+b(x+1)+c=ax^2+bx+c+Bx+C$$
$$ax^2+2ax+a+bx+b+c=ax^2+bx+c+Bx+C$$
$$2ax+a+b=Bx+C$$
$2a=B$ oraz $a+b=C$
otrzymujemy
$a=\frac{B}{2}$ oraz $b=C-a$
Następnie analizując $f(1)$ mamy
$f(1)=a+b+c$ zatem $c=f(1)-a-b$
$$c=f(1)-a-(C-a)=f(1)-C$$
Wniosek: jeśli znana jest relacja rekurencyjna $f(x+1)=f(x)+Bx+C$ oraz znamy wartość $f(1)$ to jesteśmy w stanie jednoznacznie wskazać równanie kwadratowe $ax^2+bx+c$ spełniające daną zależność rekurencyjna, gdzie
Funkcja kwadratowa i linie proste / przekątne na spirali Ulama
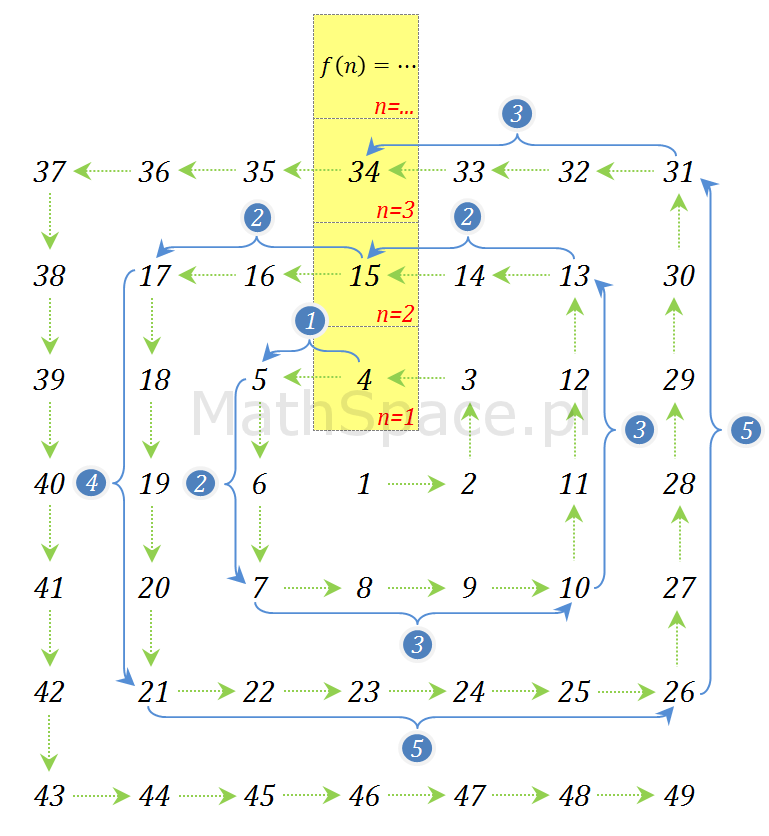
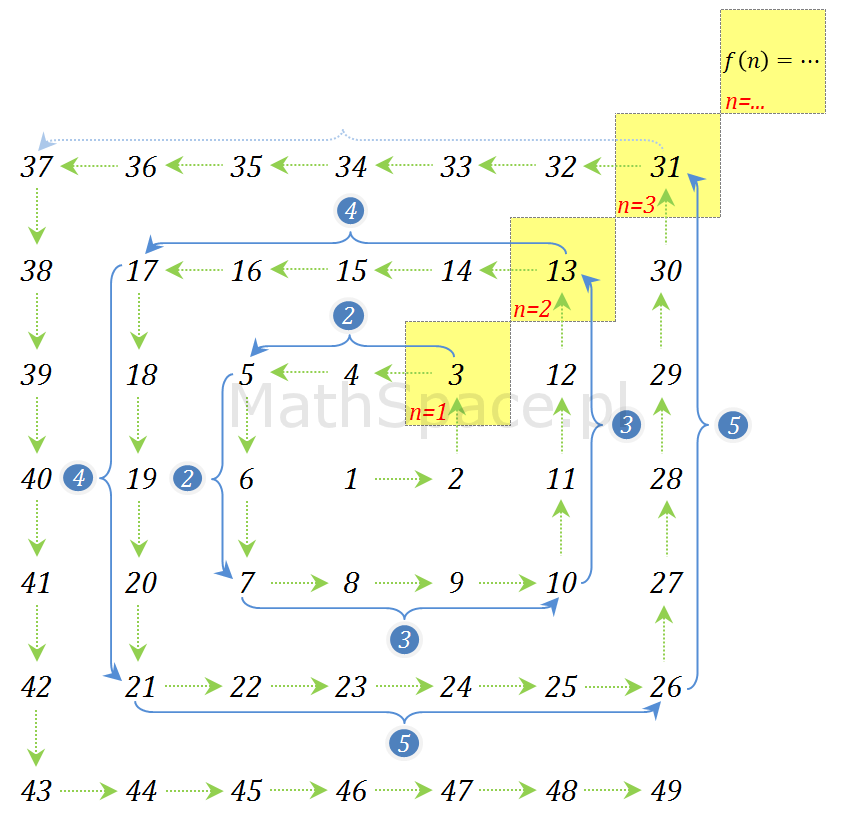
Poniżej spróbuję pokazać w jaki sposób „nawijanie prostej na kwadrat” sprawia, że parabole w efekcie otrzymują kształt linii prostych.
Przykład 1 – Pionowa prosta
Zapisujemy zależność rekurencyjną
$$f(1)=4$$
$$f(2)=f(1)+1+2+3+3+2$$
$$f(3)=f(2)+2+3+5+5+3$$
$$\ldots$$
$$f(n+1)=f(n)+n+2n+(2n+1)+(2n+1)+(n+1)$$
$$f(n+1)=f(n)+8n+3$$
Teraz, korzystając z wyprowadzonego wcześniej wzoru, wyznaczamy współczynniki a, b, c funkcji kwadratowej spełniającej $f(n+1)=f(n)+8n+3$.
$a=\frac{8}{2}=4$, $b=3-4=-1$, $c=4-3=1$
$$f(n)=4n^2-n+1$$
Dla testu czy wszystko jest ok sami podstawcie $n=1,2,3\ldots$
Przykład 2 – Przekątna (linia diagonalna)
Ponownie zapisujemy zależność rekurencyjną, tym razem nieco prostszą.
$$f(1)=3$$
$$f(2)=f(1)+2+2+3+3$$
$$f(3)=f(2)+4+4+5+5$$
$$\ldots$$
$$f(n+1)=f(n)+n+2n+2n+(2n+1)+(2n+1)$$
$$f(n+1)=f(n)+8n+2$$
Korzystając ze znanego wzoru wyznaczamy a, b, c dla $f(n+1)=f(n)+8n+2$.
$a=\frac{8}{2}=4$, $b=2-4=-2$, $c=3-2=1$
$$f(n)=4n^2-2n+1$$
Przykład: funkcja $n^2+n+41$ generująca liczby pierwsze
Wielomian $n^2+n+41$ jest funkcją „często generującą” liczby pierwsze. W tym przypadku dla każdego $n=0,1,\ldots,39$ wynik jest zawsze liczbą pierwszą. Poniżej tabela prezentująca zestawienie dla $n$ z zakresu od $0$ do $100$.
Matematyka i muzyka są ściśle powiązane przez rytm, harmonię i struktury
Matematyka i muzyka są ściśle powiązane przez rytm, harmonię i struktury, które wykorzystują matematyczne wzory i proporcje do tworzenia estetycznych i emocjonalnych doznań. Z nieśmiałą ekscytacją przedstawiam moją pierwszą poważniejszą kompozycję, w której starałem się uchwycić te połączenia.
I Am Here – RELEARN – Mariusz Gromada (2024)
I Am Here – RELEARN – Mariusz Gromada (2024)
Deep Under – RELEARN – Mariusz Gromada (2024)
Deep Under – RELEARN – Mariusz Gromada (2024)
Scalar – zaawansowana aplikacja mobilna z silnikiem matematycznym mojego autorstwa
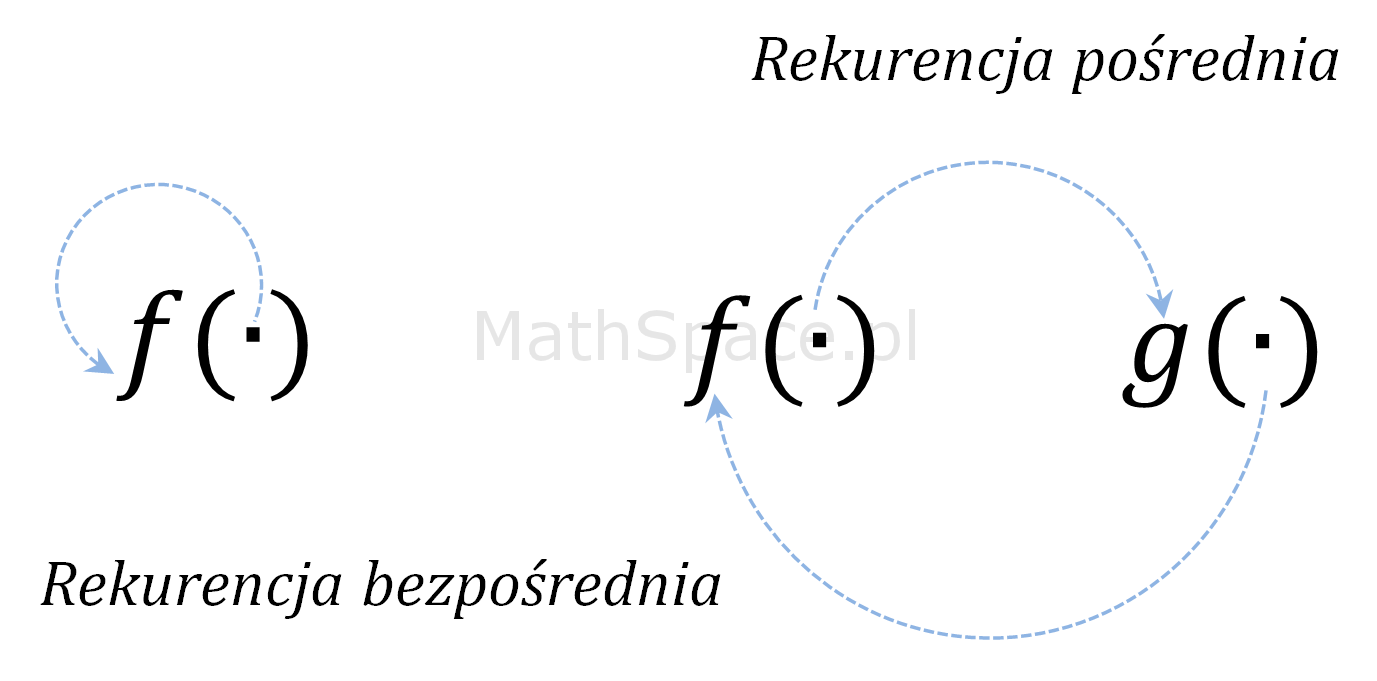
W pierwszych trzech częściach „Zabaw z rekurencją” skupialiśmy się na rekurencji bezpośredniej, tzn. na sytuacji, kiedy w ciele funkcji dochodzi do wywołania „siebie samej”. Przebieg rekurencji bezpośredniej jest dość oczywisty, struktura wywołania, argumenty, jak też warunek stopu, są takie same dla wszystkich odwołań.
Rekurencja pośrednia
O rekurencji pośredniej mówimy w sytuacji „łańcucha wywołań”. Przykładowo funkcja f(.) wywołuje funkcję g(.), następnie funkcja g(.) wywołuje f(.), zatem ponowne wywołanie funkcji f(.) realizowane jest bezpośrednio przez funkcję g(.),jednak pośrednio przez f(.), gdyż to f(.) wywołała g(.).
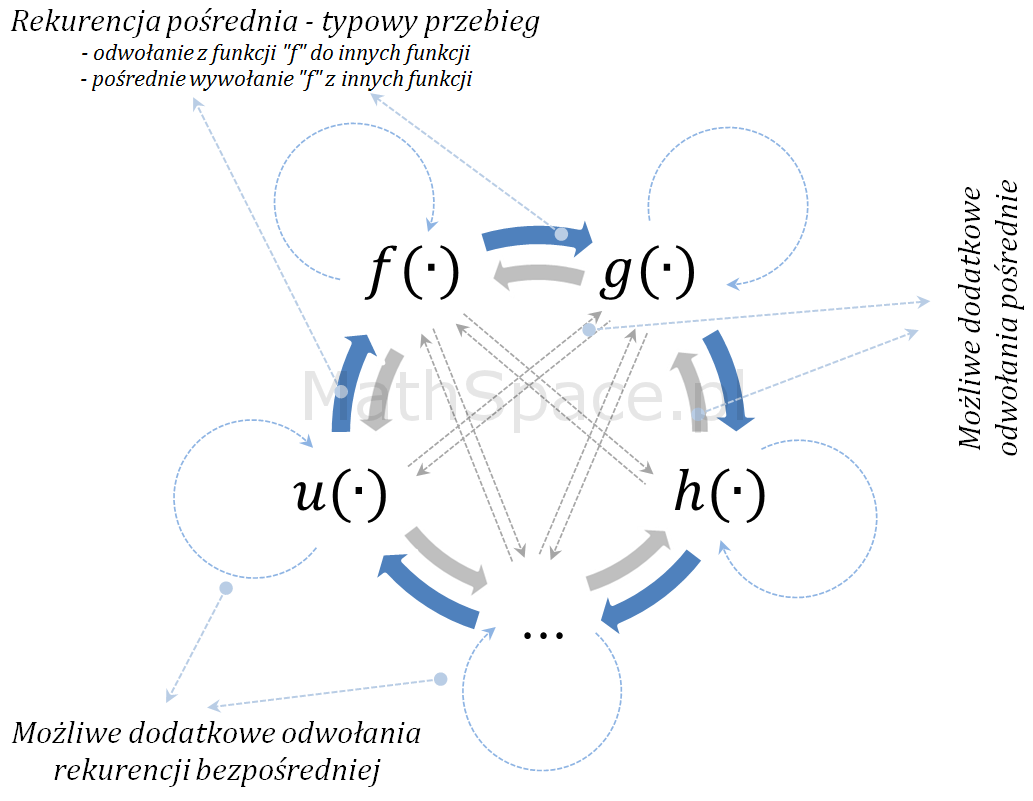
Długość łańcucha nie musi być ograniczona, w rzeczywistości wywołania pośrednie mogą mieć nietrywialną strukturę, mogą „cofać się” do poprzednich elementów, „iść na skróty”, „rozdzielać się”, a w szczególności może dochodzić do wariantów mieszanych – tzn. wywołań bezpośrednich i pośrednich (różnego typu) w ramach jednej procedury. Dobrze to obrazuje poniższy schemat.
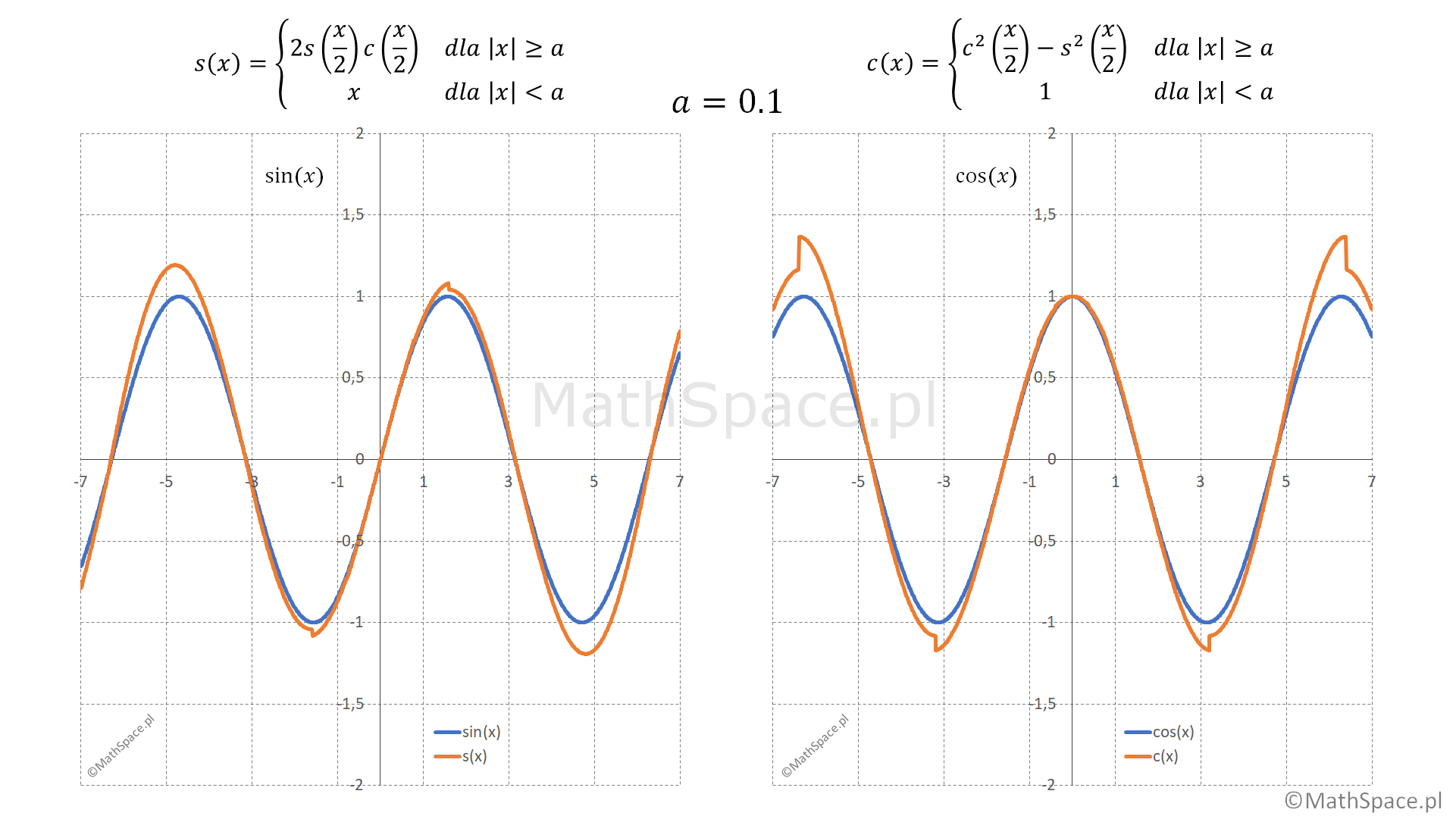
Aproksymacja funkcji sin(x) oraz cos(x) przy wykorzystaniu połączenia rekurencji bezpośredniej i rekurencji pośredniej
Przypomnijmy podstawowe tożsamości trygonometryczne dla wielokrotności kątów.
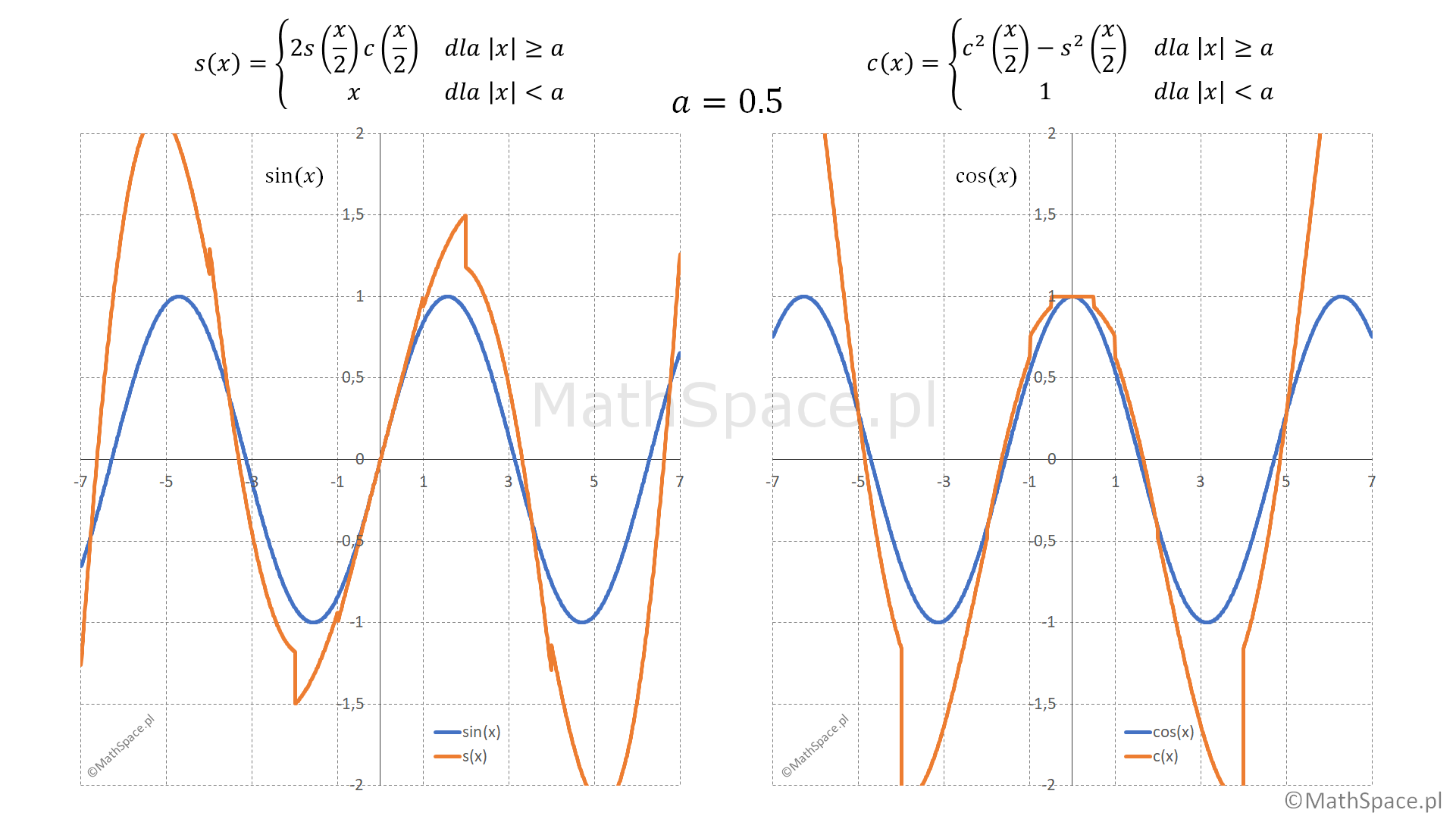
Zwróćmy uwagę, że znając rozwiązanie dla argumentu mniejszego $\frac{x}{2}$ możemy podać rozwiązanie dla $x$ – zatem tożsamości trygonometryczne są w istocie rekurencją z odwołaniami bezpośrednimi i pośrednimi! Funkcję $\sin(x)$ w otoczeniu $0$ można przybliżyć przez $x$, natomiast funkcję $\cos(x)$ przez stałą wartość $1$. Im mniejsze otoczenie $0$ wybierzemy tym lepsza aproksymacja w zadanym przedziale, a w konsekwencji mniejszy błąd oszacowania w całości. Przyjęte wartości w otoczeniu $0$ dają również pewny warunek stopu! Mamy więc wszystko co niezbędne do zastosowania strategii rekurencyjnej w aproksymacji.
Ustalmy stałą $a>0$ (reprezentującą otoczenie $0$), następnie definiujemy dwie funkcje rekurencyjne
Podkreślmy ponownie, że funkcja $\text{s}(x)$ wywołuje siebie bezpośrednio oraz wskazuje na funkcję $\text{c}(x)$, która, oprócz bezpośredniego wywołania siebie samej, wskazuje ponownie na $\text{s}(x)$. Jest to zatem ciekawa kombinacja rekurencji bezpośredniej z rekurencją pośrednią. Zapiszmy to w MathParser.org-mXparser.
/* Definicja funkcji rekurencyjncyh */
Constant a = new Constant("a = 0.1");
Function s = new Function("s(x) =  if( abs(x) < a, x, 2*s(x/2)*c(x/2) )", a);
Function c = new Function("c(x) =  if( abs(x) < a, 1, c(x/2)^2-s(x/2)^2 )", a);
/* Wskazanie, ze 's' korzysta z 'c', a 'c' korzysta z 's' */
s.addDefinitions(c);
c.addDefinitions(s);
Oczekujemy, że im mniejszy parametr $a>0$ tym lepsza aproksymacja funkcji $\sin(x)$ oraz $\cos(x)$ przez odpowiednio $\text{s}(x)$ oraz $\text{c}(x)$. Poniżej wykresy dla $a=0.5$ oraz $a=0.01$.
Wniosek – proste zapisy rekurencyjne dają złożone wyniki! 🙂
Matematyka i muzyka są ściśle powiązane przez rytm, harmonię i struktury
Matematyka i muzyka są ściśle powiązane przez rytm, harmonię i struktury, które wykorzystują matematyczne wzory i proporcje do tworzenia estetycznych i emocjonalnych doznań. Z nieśmiałą ekscytacją przedstawiam moją pierwszą poważniejszą kompozycję, w której starałem się uchwycić te połączenia.
I Am Here – RELEARN – Mariusz Gromada (2024)
I Am Here – RELEARN – Mariusz Gromada (2024)
Deep Under – RELEARN – Mariusz Gromada (2024)
Deep Under – RELEARN – Mariusz Gromada (2024)
Scalar – zaawansowana aplikacja mobilna z silnikiem matematycznym mojego autorstwa
Jednym z najprostszych testów pierwszości jest weryfikacja czy dana liczba $n$ posiada dzielnik z przedziału $(2, \sqrt{n})$ – takie podejście nazywane jest metodą naiwną – i niestety charakteryzuje się dużą złożonością obliczeniową. Nawet przy wykorzystaniu Sita Eratostenesa złożoność obliczeniowa sięga $\frac{\sqrt{n}}{\log{n}}$. Jednak w cyklu „Zabawy z rekurencją” nie bardzo zwracamy uwagę na złożoność 🙂 , bardziej chodzi o zobrazowanie jak całe algorytmy mogą być łatwo zapisane w postaci krótkich matematycznych funkcji rekurencyjnych – zatem do dzieła 🙂
Rekurencyjne poszukiwanie dzielników
Naszym zadaniem będzie zdefiniowanie funkcji zwracającej $1$ jeśli podana liczba $n$ jest liczbą pierwszą oraz $0$ w przeciwnym wypadku. Zacznijmy jednak od podania funkcji weryfikującej czy liczba posiada dzielniki.
$${\small\text{CzyDzielnik}(n, a, b)=}$$
$${\small=\begin{cases}0&\text{dla}\quad a>b\\1&\text{dla}\quad n \mod a=0\\ \text{CzyDzielnik}(n, a+1, b)&\text{w inn. przyp.}\end{cases}}$$
Powyższa funkcja zwraca $1$ jeśli liczba $n$ posiada dzielnik z przedziału $(a,b)$, oraz $0$ w przeciwnym wypadku. Następnie definiujemy wyrażenie reprezentujące naiwny test pierwszości.
Rolą funkcji „CzyPierwsza” jest jedynie „wprawienie algorytmu w ruch” oraz zwrócenie negacji wyniki funkcji „CzyDzielnik”. Proste prawda? 🙂 Sprawdźmy więc w mXparser czy to faktycznie działa.
CzyPierwsza(1) = 0.0, czas oblicz. = 0.08 s.
CzyPierwsza(2) = 1.0, czas oblicz. = 0.03 s.
CzyPierwsza(3) = 1.0, czas oblicz. = 0.026 s.
CzyPierwsza(4) = 0.0, czas oblicz. = 0.022 s.
CzyPierwsza(5) = 1.0, czas oblicz. = 0.038 s.
CzyPierwsza(6) = 0.0, czas oblicz. = 0.015 s.
CzyPierwsza(7) = 1.0, czas oblicz. = 0.028 s.
CzyPierwsza(8) = 0.0, czas oblicz. = 0.015 s.
CzyPierwsza(9) = 0.0, czas oblicz. = 0.053 s.
CzyPierwsza(10) = 0.0, czas oblicz. = 0.011 s.
Wygląda na to, że obliczenia są poprawne! Teraz możemy zweryfikować ile jest liczb pierwszych w podanym przedziale, definiując
$$\pi(n)=\sum_{i=1}^n \text{CzyPierwsza}(i)$$
/* Definicja wyrażenia sumującego wynik funkcji CzyPierwsza */
Expression pi100 = new Expression("sum(i, 1, 100, CzyPierwsza(i) )");
pi100.addFunctions(CzyPierwsza);
/* Obliczenie i wyświetlenie wyniku */
mXparser.consolePrintln( "Liczba liczb pierwszych w przedziale (1,100) = " + pi100.calculate());
+ wynik
Liczba liczb pierwszych w przedziale (1,100) = 25.0
Pozdrowienia,
Mariusz Gromada
Pamiętajcie, że uruchamiając kody mXparsera należy dodać w nagłówku:
Matematyka i muzyka są ściśle powiązane przez rytm, harmonię i struktury
Matematyka i muzyka są ściśle powiązane przez rytm, harmonię i struktury, które wykorzystują matematyczne wzory i proporcje do tworzenia estetycznych i emocjonalnych doznań. Z nieśmiałą ekscytacją przedstawiam moją pierwszą poważniejszą kompozycję, w której starałem się uchwycić te połączenia.
I Am Here – RELEARN – Mariusz Gromada (2024)
I Am Here – RELEARN – Mariusz Gromada (2024)
Deep Under – RELEARN – Mariusz Gromada (2024)
Deep Under – RELEARN – Mariusz Gromada (2024)
Scalar – zaawansowana aplikacja mobilna z silnikiem matematycznym mojego autorstwa
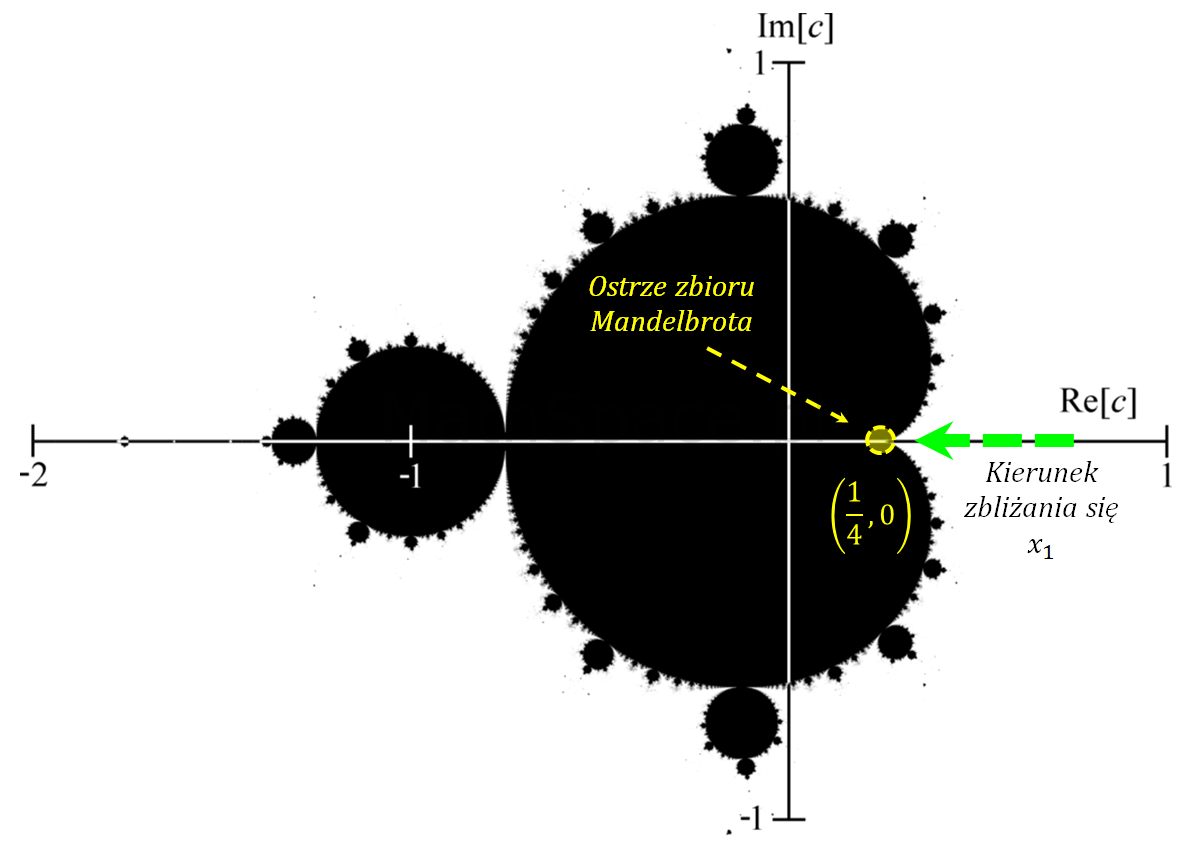
Dziś ciekawostka w nawiązaniu do wpisu z dnia 20 października 2015 roku „Liczba PI ukryta w zbiorze Mandelbrota”, ujawniająca nietrywialne powiązanie liczby $\pi$ z prędkością ucieczki do nieskończoności przy zbliżaniu się punktu startu iteracji do „ostrza” zbioru Mandelbrota. Brzmi trochę skomplikowanie? Poniżej wyjaśnienie 🙂
Zbliżanie się do „ostrza” zbioru Mandelbrota
Rozważmy równanie rekurencyjne dla liczb rzeczywistych
Powyższe wyrażenie powstaje na bazie równania (w liczbach zespolonych) opisującego zbiór Mandelbrota
$$z_n=z_{n-1}^2+c$$
Ograniczając się do prostej rzeczywistej (dlatego użyłem zapisu $x_n$) przeanalizujmy zachowanie $x_n$ przy zbliżaniu się elementu $x_1=\frac{1}{4}+\epsilon$ do „ostrza” (ang. „cusp”) zbioru – ostrze to punkt o współrzędnych $(\frac{1}{4},0)$.
Szybkość ucieczki do nieskończoności
Ustalając odpowiednio małe $\epsilon>0$ decydujemy jak bardzo chcemy się zbliżyć do „ostrza”. Teraz zadanie polega na znalezieniu pierwszego $n$, dla którego $x_n>=2$. Takie minimalne $n$ jest dobrą miarą prędkości ucieczki $x_n$ do nieskończoności w zależności od wybranego $\epsilon$. Na marginesie dodam, że zbiór Juli dla równania Mandelbrota (na powyższym obrazku oznaczony kolorem czarnym), reprezentuje punkty „nieuciekające” do nieskończoności w trakcie nieskończonej iteracji . Ta tematyka jest sama w sobie bardzo ciekawa i zapewne kiedyś coś napiszę o atraktorach.
WOW! Jaki super wzorzec liczby wymaganych iteracji, aby przekroczyć 2! Dostajemy coś, co przypomina $\pi$, jednak wymaga postawienia „przecinka” w odpowiednim miejscu!Można również zauważyć, że 100-krotne zmniejszenie $\epsilon$ zwiększa niezbędną liczbę iteracji około 10-krotnie. Zmniejszając $\epsilon$ otrzymujemy liczbę coraz bardziej „przypominającą” $\pi$ 🙂
Matematyka i muzyka są ściśle powiązane przez rytm, harmonię i struktury
Matematyka i muzyka są ściśle powiązane przez rytm, harmonię i struktury, które wykorzystują matematyczne wzory i proporcje do tworzenia estetycznych i emocjonalnych doznań. Z nieśmiałą ekscytacją przedstawiam moją pierwszą poważniejszą kompozycję, w której starałem się uchwycić te połączenia.
I Am Here – RELEARN – Mariusz Gromada (2024)
I Am Here – RELEARN – Mariusz Gromada (2024)
Deep Under – RELEARN – Mariusz Gromada (2024)
Deep Under – RELEARN – Mariusz Gromada (2024)
Scalar – zaawansowana aplikacja mobilna z silnikiem matematycznym mojego autorstwa
Okres średniowiecza, kobieta winna uprawiania magii, kara straszna – spalenie na stosie! Nadszedł dzień, tłum gawiedzi, czarownica na stosie, płomienie, wiedźma krzyczy – więcej drewna! Więcej drewna! Tłum zdziwiony, mimo wszystko spełnia ostatnie życzenie opętanej. Wiedźma nie przerywa – jeszcze więcej drewna! Więcej drewna! Z oddali dobiega nagły i stanowczy sprzeciw – STOP! Czarownica chce przepełnić stos!
🙂
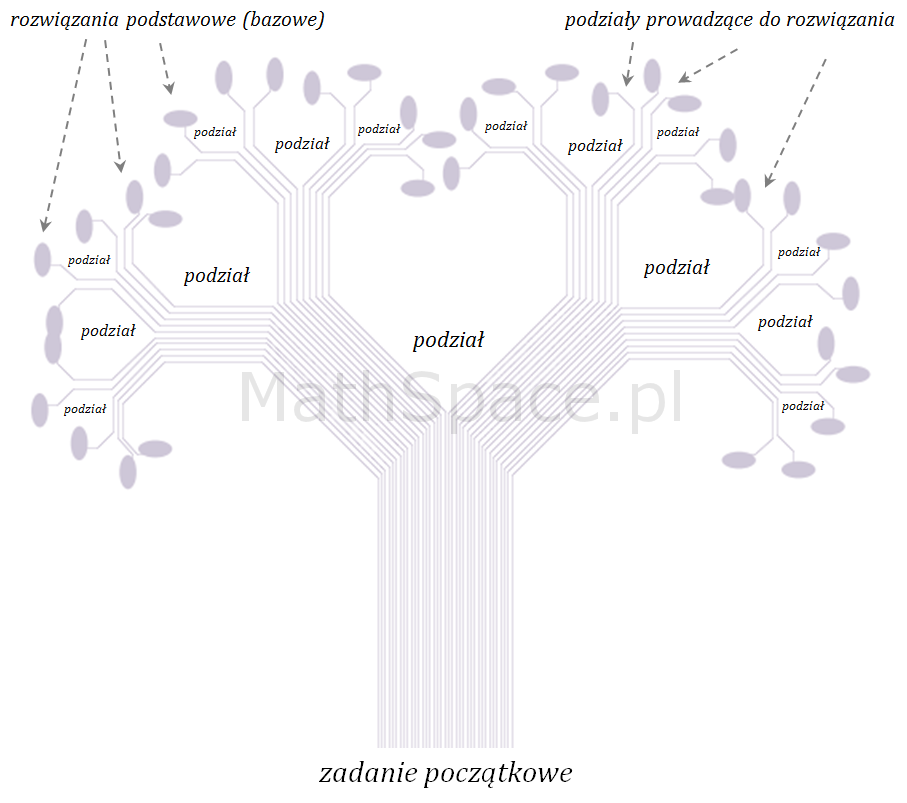
Czym jest rekurencja?
Zazwyczaj o rekurencji myślimy jako o procesie podziału zadania na mniejsze, następnie podziału na jeszcze mniejsze, i jeszcze mniejsze … dochodząc do zadań, dla których rozwiązanie jest znane. Od tego momentu zaczyna się składanie „mniejszych” rozwiązań w „większe”, następnie tych większych w jeszcze większe, … i w jeszcze większe … kończąc na rozwiązaniu zadania początkowego. Dla przykładu zapiszmy funkcję n! w postaci rekurencyjnej.
Podane wyżej przykłady zapisów rekurencyjnych (n!, suma n-pierwszych wyrazów ciągu, ciąg Fibonacciego) są tak naprawdę rekurencyjną realizacją pętli „for” – znamy przecież dokładnie liczbę niezbędnych operacji do wykonania, a i same operacje są raczej łatwe oraz czytelne – zatem zagnieżdżenie ich w pętli „for” nie powinno spowodować utraty przejrzystości kodu.
Poszukiwanie rozwiązania – czyli rekurencja w roli pętli „While/Until”
W metodach numerycznych często stosuje się strategie rekurencyjne – w takiej sytuacji, będąc w kroku $n$, weryfikujemy czy propozycja rozwiązania $n$ spełnia kryterium stopu (np. jakość oszacowania), jeśli tak – kończymy z rozwiązaniem $n$, jeśli nie – przechodzimy do badania propozycji rozwiązania $n+1$. Procedurę rozpoczynamy od kroku 0 (zerowego).
Przykład: znając definicję silni chcemy znaleźć pierwsze $n$, dla którego $n! >= 100$ – takie zadanie formalnie możemy zapisać jako:
/* Definicja funkcji rekurencyjnej */
Function S = new Function("S(n) = if( n! < 100, S(n+1), n )"); /* Obliczenia i wyświetlenie wyniku */ System.out.println( "Pierwsze n, że n! >= 100 to n = " + S.calculate(0) );
+ wynik:
Pierwsze n, że n! >= 100 to n = 5.0
Rekurencja bezpośrednia
Wszystkie omawiane wyżej typy rekurencji polegają na wywołaniu z ciała funkcji „siebie samej”, dlatego należą do bardziej ogólnej klasy nazywanej rekurencją bezpośrednią.
Wydajność
Implementacje na bazie rekurencji są bardzo czytelne, o często minimalnym rozmiarze kodu. Jednak coś za coś – tracimy bardzo dużo na złożoności obliczeniowej (powtarzane operacje, dzielenie zadań, operacje na stosie) oraz wymogach pamięci (głównie struktura stosu) – to właśnie dlatego czarownica błagała o drewno – licząc na przerwanie procesu z tytułu przepełnienia stosu 🙂
Matematyka i muzyka są ściśle powiązane przez rytm, harmonię i struktury
Matematyka i muzyka są ściśle powiązane przez rytm, harmonię i struktury, które wykorzystują matematyczne wzory i proporcje do tworzenia estetycznych i emocjonalnych doznań. Z nieśmiałą ekscytacją przedstawiam moją pierwszą poważniejszą kompozycję, w której starałem się uchwycić te połączenia.
I Am Here – RELEARN – Mariusz Gromada (2024)
I Am Here – RELEARN – Mariusz Gromada (2024)
Deep Under – RELEARN – Mariusz Gromada (2024)
Deep Under – RELEARN – Mariusz Gromada (2024)
Scalar – zaawansowana aplikacja mobilna z silnikiem matematycznym mojego autorstwa
Skalar - kalkulator, funkcje, wykresy i skrypty - Made in Poland
Skalar to potężny silnik matematyczny i matematyczny język skryptowy, który zbudowany jest na bazie MathParser.org-mXparser
Kliknij na wideo i zobacz Skalara w akcji 🙂
Scalar Lite – wersja lite
Scalar Pro – wersja profesjonalna
Kontynuując przeglądanie strony, wyrażasz zgodę na używanie przez nas plików cookies. więcej informacji
Aby zapewnić Tobie najwyższy poziom realizacji usługi, opcje ciasteczek na tej stronie są ustawione na "zezwalaj na pliki cookies". Kontynuując przeglądanie strony bez zmiany ustawień lub klikając przycisk "Akceptuję" zgadzasz się na ich wykorzystanie.